Gestaltung der sozialen Mensch-Roboter-Interaktion
Human-Robot Interaction, Design Principles, Interaction Strategies, User Testing, User Experience, Social Robotics
Durch den demografischen Wandel wächst die Nutzergruppe der älteren Personen mit kognitiven und/oder motorischen Beeinträchtigungen stetig. Die meisten älteren Menschen wünschen sich so lange wie möglich in den eigenen vier Wänden leben zu können. Alltägliche Abläufe, die im höheren Alter wechselnde Herausforderungen darstellen, sollen durch intelligente Umgebungen und eine intuitive User Experience der Mensch-Roboter-Interaktion (MRI) vereinfacht und zu einem harmonischen Erlebnis werden. Um eine partnerschaftliche Beziehung von Mensch und Roboter zu ermöglichen reicht eine technische Funktionstüchtigkeit nicht aus. Insbesondere für technologie-unerfahrene Nutzer sollte Technik nicht um ihrer selbst willen existieren, sondern um konkret Nutzen zu stiften. Daher muss das Vertrauen in die Mensch-Roboter-Interaktion erhöht werden. Das größte Potenzial bieten hierbei verschiedene Interaktionsstrategien seitens der Roboter.
Forschungsfrage & Zielsetzung
Die Frage ist also, wie muss die Mensch-Roboter-Interaktion gestaltet sein, damit sie in den eigenen vier Wänden geduldet wird? Um diese Frage zu beantworten wurden in der Arbeit exemplarisch drei Robotiktypen beleuchtet. Das Ziel dabei war, allgemeingültige Interaktionsstrategien zu gestalten, die sich auf verschiedene Robotiksysteme übertragen lassen.
Fokus
Fokus der Arbeit lag auf der Generierung systemübergreifender Interaktionsstrategien für verschiedene Robotersysteme, die Raum und Aufgabe mit einem Menschen teilen und die menschliche Handlung und Entscheidung unterstützen und dementsprechend handeln.
Nutzergruppe
Die Arbeit fokussierte sich insbesondere auf die ältere Nutzergruppe, die mäßig motorisch und kognitiv eingeschränkt ist. Sie kann ihren Alltag eigenständig und/oder mit geringfügiger Hilfe im heimischen Umfeld bewältigen. Um Robotersysteme für private, menschennahe Anwendungen attraktiver zu machen, ist es notwendig, sich genauer damit auseinanderzusetzen, wie der Nutzer die Interaktion mit einem Roboter empfindet. Die Wahrnehmung von Gefühlen und Emotionen der Roboteraktionen standen dabei im Vordergrund.

Ziel der sozialen Robotik
Ziel der Mensch-Roboter-Interaktion ist es, Interaktionen zu gestalten die auf die sozialen und emotionalen Bedürfnissen ihrer Nutzer sowie auf die menschlichen Werte eingehen.
Vorgehen
Für diese Erprobung konzentrierte sich die Studie auf drei verschiedene Robotiktypen. Den humanoiden Roboter »Pepper« (SoftBank Robotics), den animoiden Roboter »MiRo« (Consequential Robotics) und eine abstrakte Variante, den Staubsaugerroboter »Neato Botvac D85« (Neato Robotics). Die Interaktionsstrategien wurden in Form verschiedener Modalitäten (wie z.B. Sprache, Blick, nonverbales Verhalten, Farbe, Licht, Ton) festgehalten und exemplarisch in Sketches oder Animationen visualisiert und angewendet. Dabei fokussierten sich die Use Cases auf die Kernbereiche, der Gesundheits- und Alltagsunterstützung. Innerhalb einer qualitativen Nutzerstudie wurden die einzelnen Strategien auf ihre Akzeptanz evaluiert. Basierend auf den Ergebnissen der Nutzerstudie entstanden Empfehlungen für die zukünftige Gestaltung einer sozial, akzeptierten Mensch-Roboter-Interaktion.

Modalitätenbaukasten
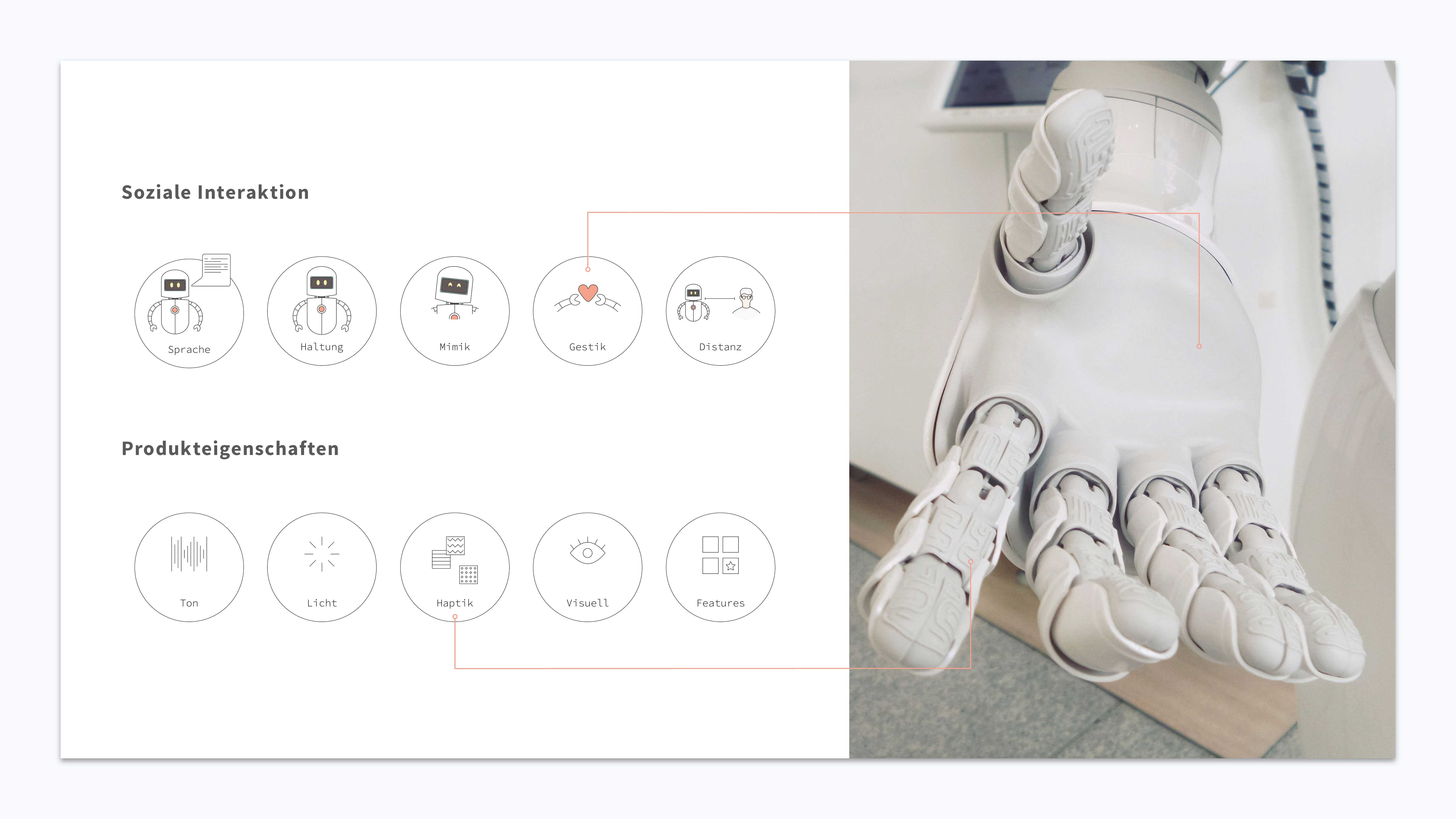
Mithilfe der drei Robotertypen und den Robotercharakteren aus der Filmografie wurden verschiedene Modalitäten erfasst. Modalitäten, die übergreifend für alle drei Robotertypen verwendet werden können wurden als »universelle Modalitäten« definiert und in einem Baukasten festgehalten, damit auch nach der Master-Thesis darauf zurückgegriffen werden kann. Der Baukasten unterscheidet in Modalitäten der sozialen Interaktion, wie zum Beispiel Sprache und nonverbales Verhalten, als auch in Produkteigenschaften, wie zum Beispiel Licht und Ton. Die aktuellen Interaktionsfähigkeiten, die die Roboter zurzeit aufweisen, wurden als »Ist-Modalitäten« festgehalten und in einem weiteren Schritt in die Zukunft skaliert, um dem technischen Fortschritt gerecht zu werden. Gearbeitet wurde sowohl mit den in der Zukunft liegenden Modalitäten, als auch mit den Modalitäten, die sofort umgesetzt werden können.

Forschungsbedarf
Für grafische Benutzungsoberflächen ist bereits ein umfangreiches Gestaltungswissen verfügbar, wogegen bei den Interaktionsstrategien der MRI noch großer Forschungsbedarf besteht. Durch die Gestaltung von bestimmten Modalitäten in der MRI würden einerseits die Nutzer durch intuitive und natürliche Interaktionsgestaltung profitieren und andererseits können Entwickler und Anbieter von MR-Systemen auf erprobte Nutzerstudien zurückgreifen und dadurch die User Experience maßgeblich verbessern.
Interaktionsgestaltung
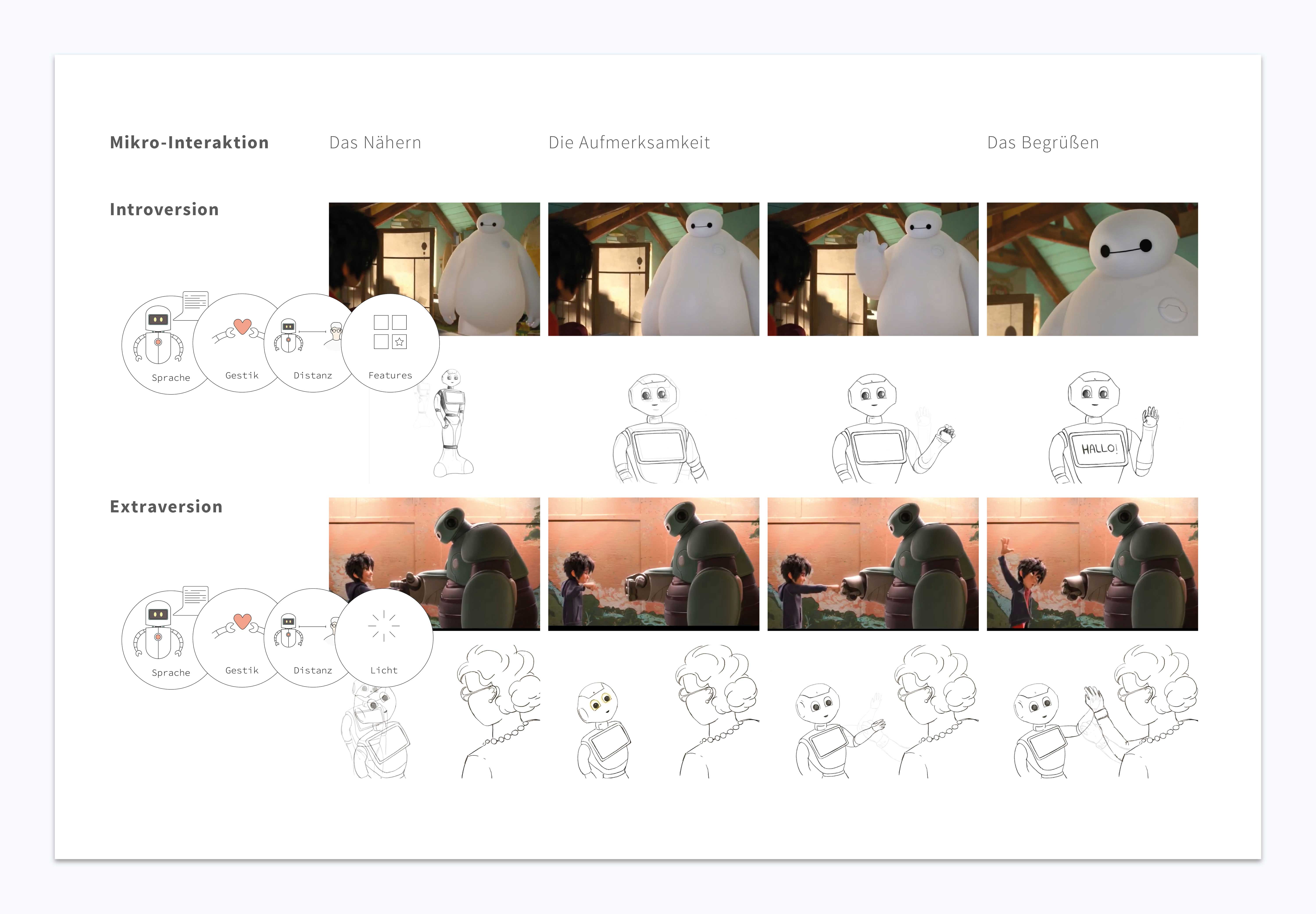
Im Rahmen der Master-Thesis wurden die gestalteten Interaktionen innerhalb von Use Cases in einer qualitativen Nutzerstudie untersucht. Die Use Cases beschäftigten sich mit dem Warten (was macht der Roboter, wenn er alleine zu Hause ist bzw. wenn er nichts zu tun hat), der Begrüßung und der Erinnerung an die Medikamenteneinnahme. Innerhalb dieser Use Cases befanden sich Mikro-Interaktionen, welche überprüften, wie sich beispielsweise der Roboter dem Nutzer nähern soll, wie der Roboter seine Aufmerksamkeit dem Nutzer anzeigt oder selber auf sich aufmerksam macht. Dabei wurden pro Interaktion und Roboter eine introvertierte und eine extrovertierte Variante auf ihre Wirkung überprüft. Die Intra- und die Extraversion sollte nach dem Fünf-Faktoren-Modell (FFM) der Persönlichkeit Aufschlüsse darüber geben, welches Persönlichkeitskonstrukt bei welchem Robotertyp als angemessen und verständlich bewertet wird. Ziel der qualitativen Studie war es, die Variante zu ermitteln, die am meisten Akzeptanz hervorgerufen haben.

Gestaltungsbeispiel
Disney und auch andere Figuren in Filmen geben uns Beispiele, wie Interaktionen gestaltet werden können. 1981 veröffentlichte die Disneyanimatoren Frank Thomas und Ollie Johnston »The Illusion of Life«. In der Literatur beschreiben sie zwölf Grundprinzipien für die authentische Animation von Figuren. Bis heute gilt »The Illusion of Life« als Bibel der Animation und wird sowohl von Disney als auch von vielen anderen Produzenten als Werkzeug genutzt. Besonders dabei ist, dass die Prinzipien vermehrt bei Maschinen und Robotern angewendet werden.
Im Folgenden dazu eine abstrahierte Version der Herleitung der Interaktionen und der Umsetzung der Modalitäten im Use Case des Begrüßens. Die Interaktionsanalyse geschah in diesem Fall mithilfe von Disneys humanoiden Roboter »Baymax«.
Gestaltungsbeispiel
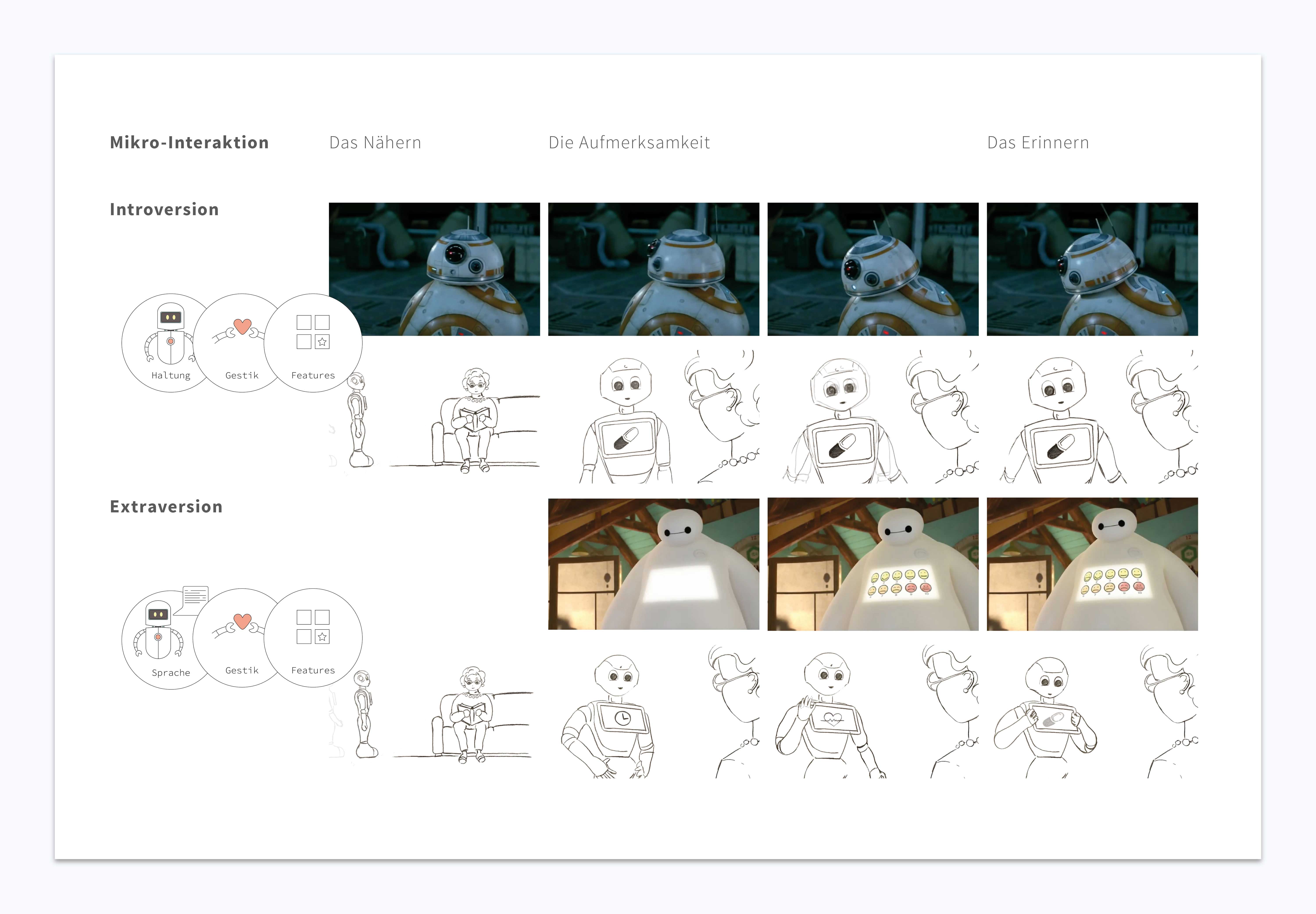
Die »Essential Interaction« des Erinnerns. Im Beispiel soll »Pepper« auf die Medikamenteneinnahme aufmerksam machen. Die Varianten unterscheiden sich in einem introvertierten und einem extrovertierten Verhalten. Die Interaktion wurde von »Baymax« und »BB8« adaptiert.
Gestaltungsbeispiel
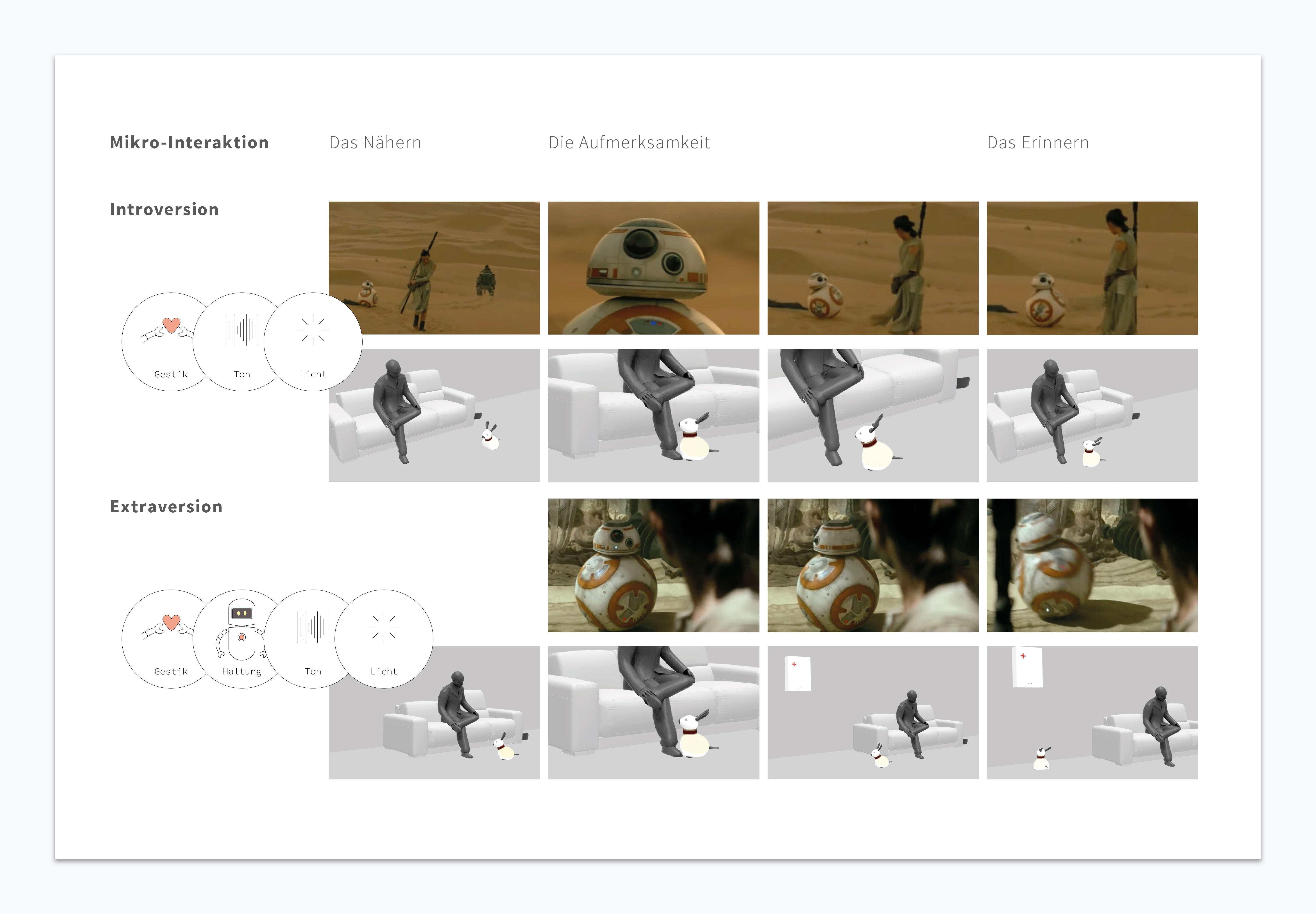
In diesem Beispiel soll der animoide Roboter »MiRo« auf die Medikamenteneinnahme aufmerksam machen.
Wie bereits ersichtlich wurde, können durch die Abstraktion der »Essential Interactions« unterschiedliche Robotertypen als Inspirationsquelle dienen und bespielt werden. In diesem Fall kann vom abstrakten Roboter »BB8« das Verhalten auf den animoiden Roboter »MiRo« übertragen werden. Für die Übertragung dieser Interaktionen wurde nun im Folgenden die Strategie abstrahiert.
Abstraktion & Übertragbarkeit
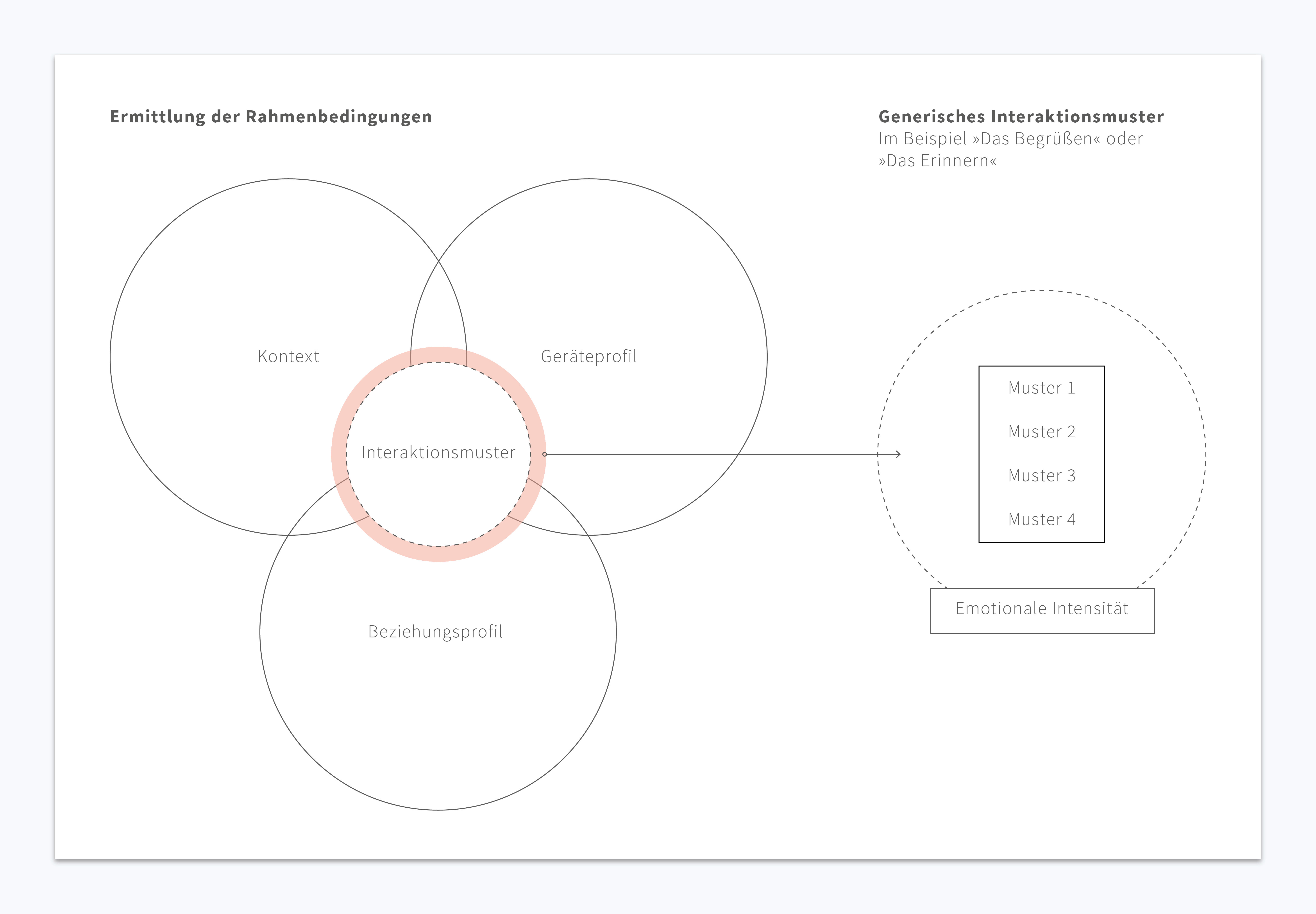
Die Grundlage bildet der Kontext, also in welcher Umgebung befindet sich der Roboter. Das Geräteprofil bestimmt die Modalitäten des Roboters, im Beispiel gehört »Baymax« der humanoiden Form an. Das Beziehungsprofil bestimmt wie lange sich Nutzer und Roboter bereits kennen und in welcher Beziehung die beiden zueinander stehen. Auf Basis der Rahmenbedingungen wird durch einen Auslöser, welcher im Kontext geschieht, ein generisches Interaktionsmuster beim Roboter ausgelöst.
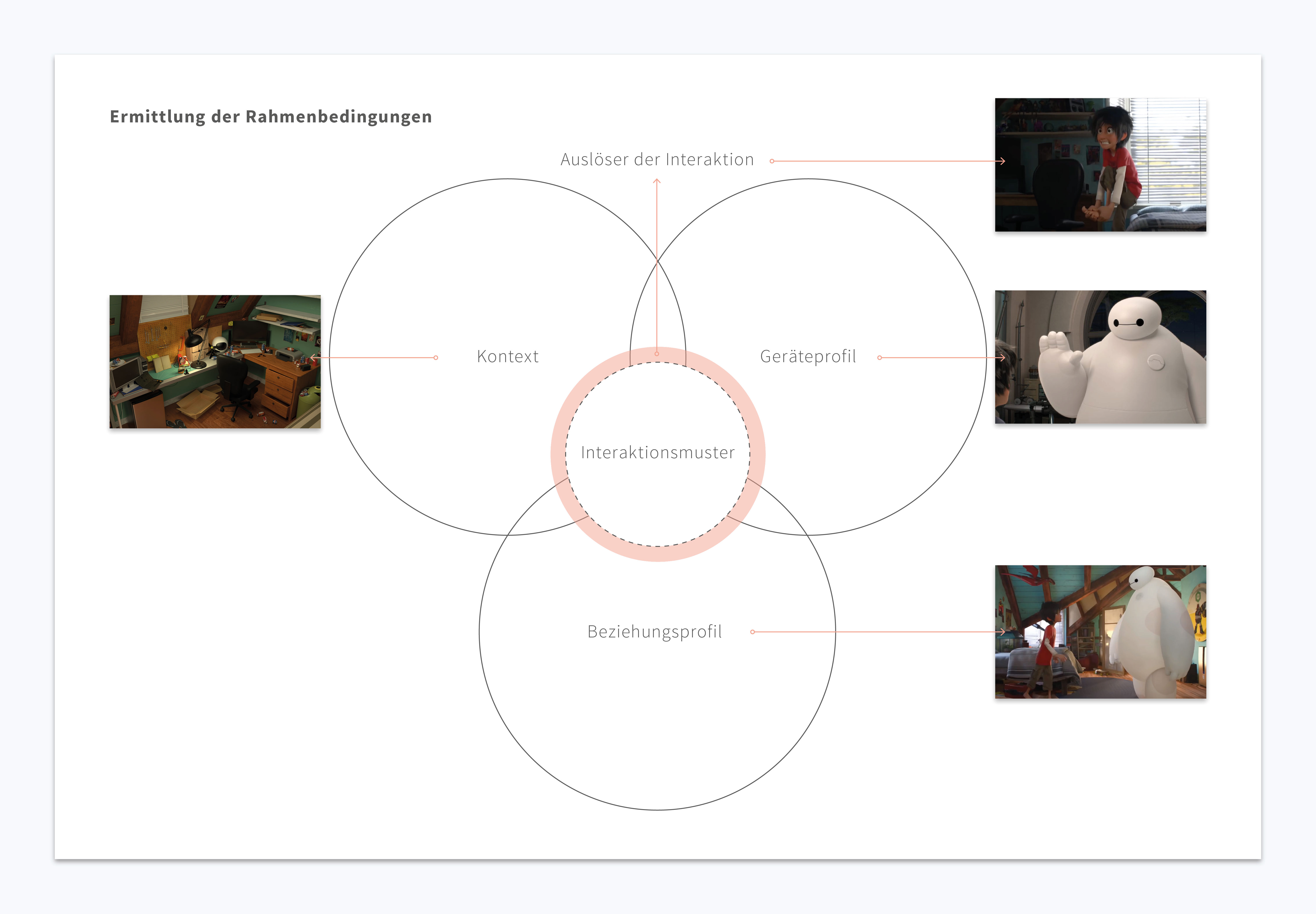
Abstraktion & Übertragbarkeit
Das generische Muster besteht aus weiteren, in der Hierarchie untergeordneten, Mustern. Diese Muster werden unter der Berücksichtigung der emotionalen Intensität ausgeführt, also je nachdem wie gut oder schlecht sich Roboter und Nutzer kennen.
Exkurs: Emotionen und Systemdarstellungen
Innerhalb der Thesis wurde ein Exkurs in die Wahrnehmung von Gefühlen und Emotionen der Roboteraktionen unternommen und visualisiert. Innerhalb einer quantitativen Online-Umfrage konnten erste Tendenzen aufgezeigt werden, welche Emotionen erkannt werden und welche nicht.
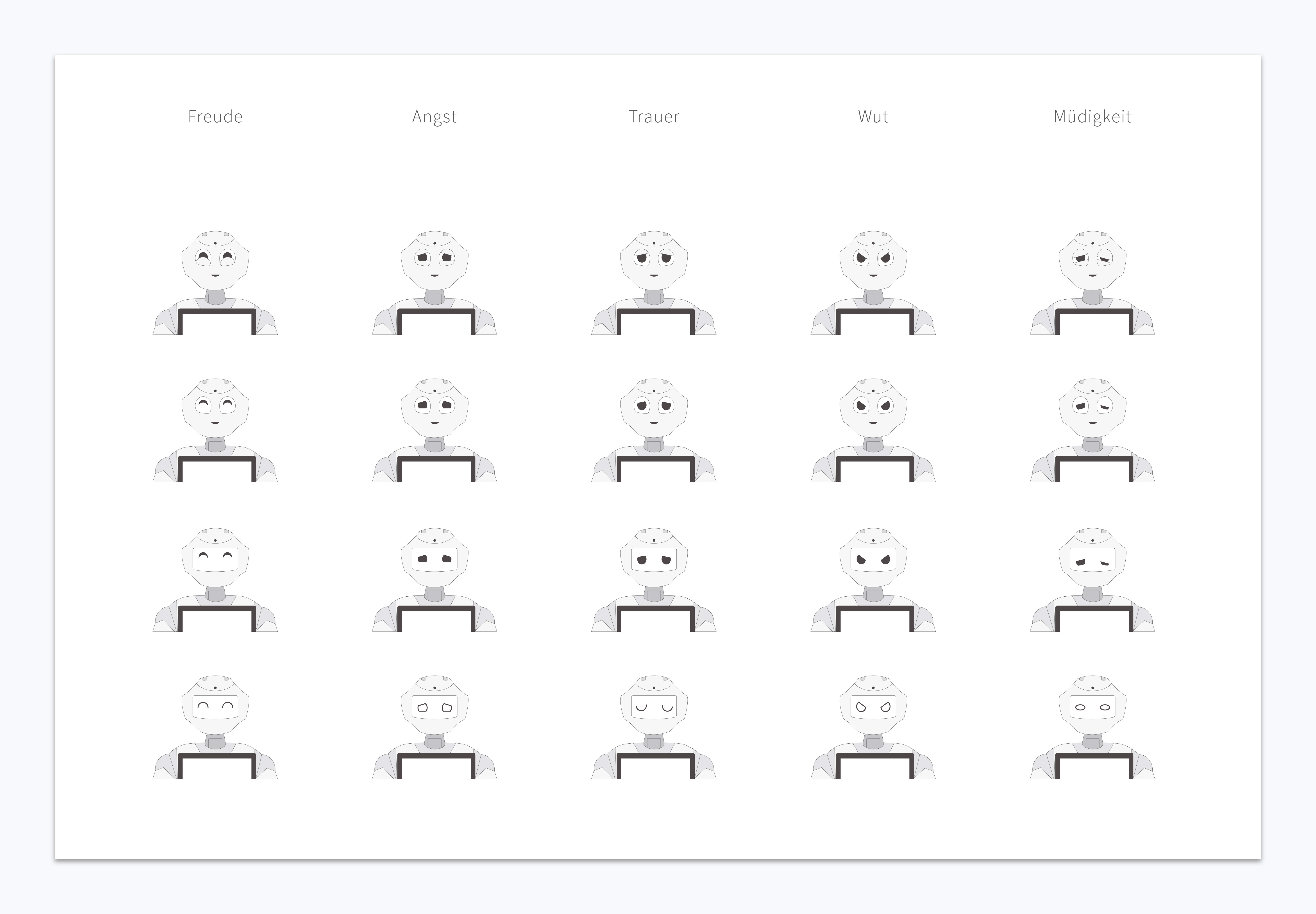
Um verschiedene Gesichtsausdrücke bei »Pepper« visualisieren zu können, wurden das »Facial Action Coding System« von Paul Ekman verwendet. Im Beispiel sind universelle Emotionen wie Ärger, Traurigkeit, Angst und Freude dargestellt, dabei wurden unterschiedliche Bespielungsmöglichkeiten ausprobiert, wie z. B. Augenlider oder ein Display als Gesicht. »Pepper« kann momentan nur einen Gesichtsausdruck darstellen. Möglicherweise reicht dieser für sein aktuelles Einsatzgebiet am Empfangstresen und auf Messen aus, allerdings könnte dieser Gesichtsausdruck im häuslichen Umfeld schnell langweilig oder sogar angsteinflößend wirken.
Exkurs: Emotionen und Systemdarstellungen
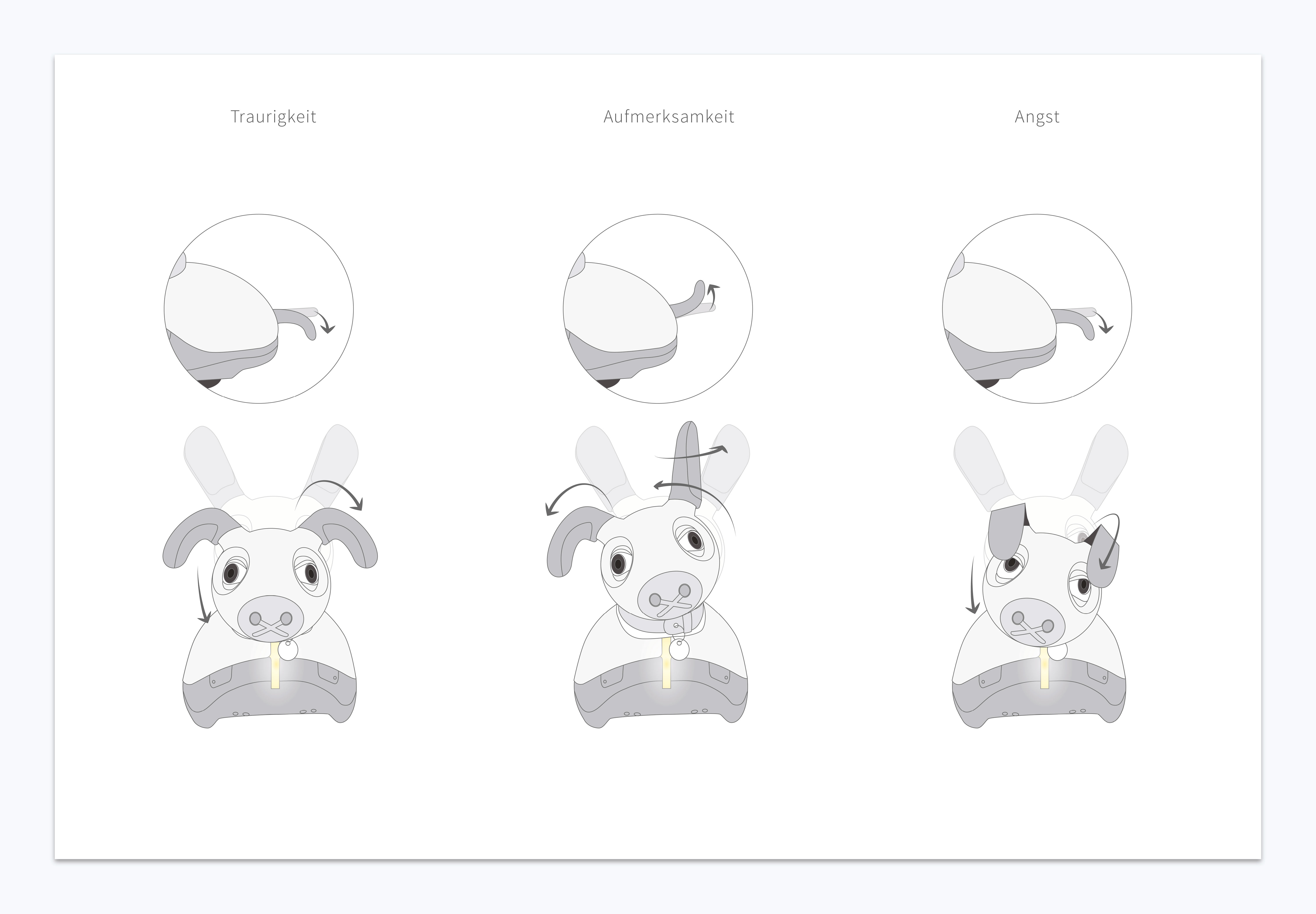
Auch bei »MiRo« wurden verschiedene Gemütszustände visualisiert. Da das Developer Kit keine validierten Design Patterns zur Verfügung stellt, mussten auch hier Emotionszustände unter Berücksichtigung der Bewegungsradien erprobt werden.
Qualitative Nutzerstudie
Im Rahmen der Masterarbeit wurden die sozialen Interaktionen in einer qualitativen Nutzerstudie untersucht. Die Interaktionen bestanden aus den erarbeiteten Use Cases (Warten, Begrüßung und Erinnerung an die Medikamenteneinnahme) und den untergeordneten »Essential Interactions« (z. B. Nähern, Langzeitwarten, Aufmerksamkeit, ...). Dabei werden pro Interaktion und Roboter eine introvertierte und extrovertierte Variante auf deren Wirkung überprüft. Ziel der qualitativen Studie ist es, die Varianten zu ermitteln, die in der sozialen Interaktion zwischen Mensch und Roboter am meisten Akzeptanz bei den Probanden hervorrufen. Außerdem wollen wir zuvor aufgestellte Hypothesen durch eine separate Auswertung verifizieren oder falsifizieren.

Qualitative Nutzerstudie: Bewertung
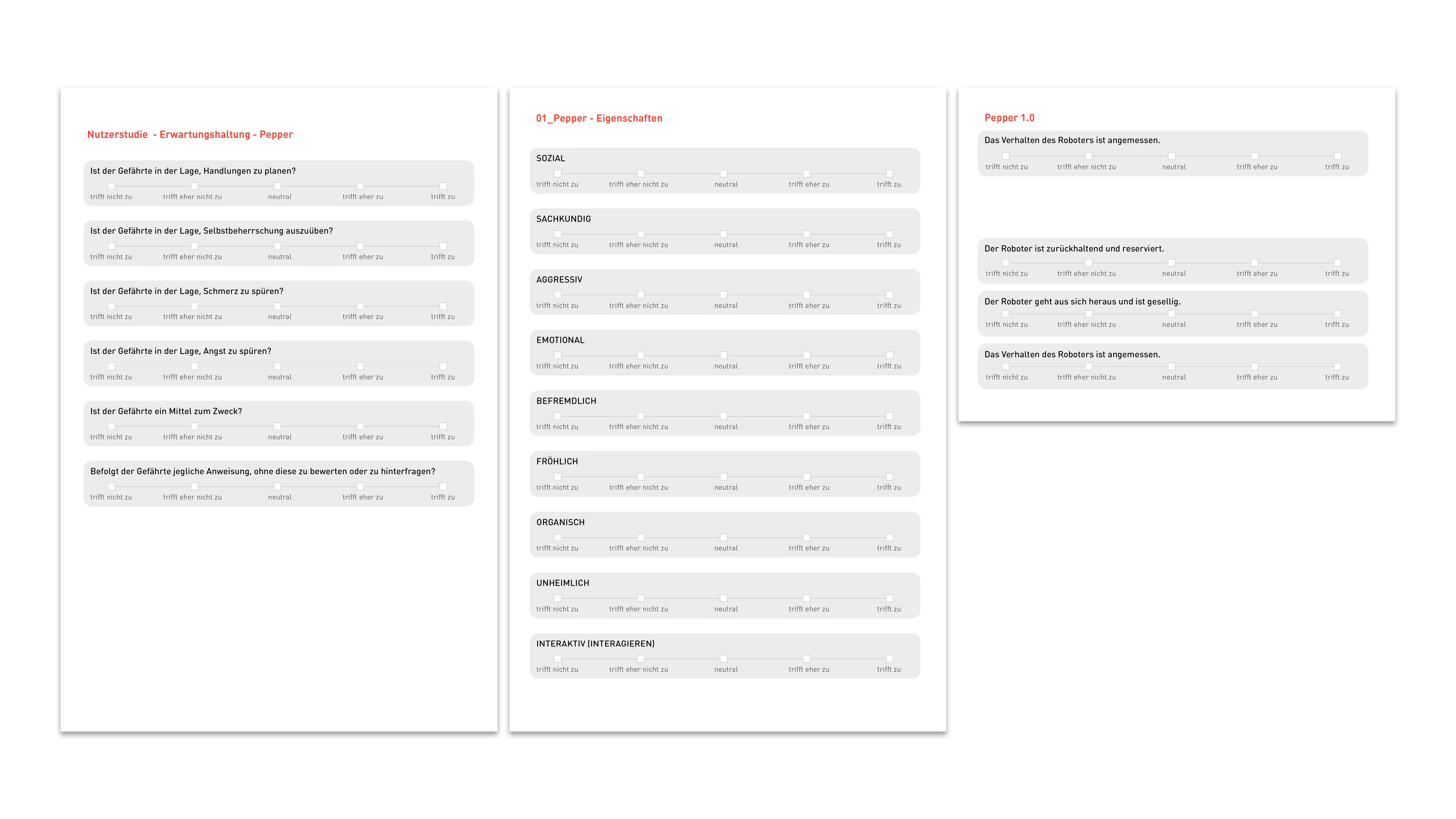
Jeweils nach dem Kennenlernen von Proband und Robotern und nach der Beurteilung der vorgespielten Interaktionen wurde eine Bewertung des Gesamteindrucks abgefragt. Die Bewertungsbögen wurden nach zwei Auswertungsmethoden bewertet, der »Theory of Mind« und der »RoSAS« (Robotic Social Attributes Scale).
Nachdem den Probanden am Bildschirm verschiedene Szenarien vorgespielt worden sind, wurde ein Teil der Analysemethode der »Big Five Inventory« angewandt. Diese machte es möglich, die Angemessenheit der Use Cases intuitiv und verstanden vom Probanden bewerten zu lassen.

Von der aufgabenorientierten Maschine zum sozialorientierten Partner
Aus unseren Studien und Rechercheergebnissen ging hervor, dass Nutzer oft dazu neigen, Produkte in ihrem engeren Umfeld zu individualisieren und zu verlebendigen. Vom Aufkleben von Wackelaugen auf den Staubsaugerroboter bis hin zum Spitznamen für das rostige, alte Auto. Individuelle Attribute schaffen eine persönliche Verbindung und einen emotionalen Zugang. Daher werden leblose Produkte immer erst zum persönlichen Gegenstand, wenn der Nutzer sie dazu macht. Studien haben bewiesen, dass Nutzer keinen Staubsaugerroboter kaufen würden, der von vorneherein (aufgeklebte) Augen hat. Sie kaufen ihn des Zwecks und der Funktion wegen und finden es aus dieser Position heraus unangemessen, dass der Roboter lebendige Attribute hat. Erst im heimischen Umfeld selbst und nach einer gewissen Interaktionszeit hebt der Nutzer das Objekt auf eine emotionale Ebene. Zielführend ist daher den Roboter nicht zu Beginn der Beziehung als verlebendigte Maschine in die emotionale und private Komfortzone des Nutzers zu positionieren. Die Beziehung zwischen Mensch und Roboter wäre daher, wie im zwischenmenschlichen Gefüge auch, ein Prozess. Ein Prozess, in dem sich der Mensch erst dem Roboter annähert und diesem so viel Lebendigkeit zuspricht, wie er für richtig hält. Einem Roboter Persönlichkeit und Leben einzuhauchen, wäre damit kein Schritt der Ausnutzung maximaler Möglichkeiten der Technologie, sondern eine Entwicklung, die immer nur vom Nutzer vorangetrieben werden darf.
Erwartungskonforme Robotik
Bei der Gestaltung des Roboters sollte Wert darauf gelegt werden, dass nur so viele Erwartungen geschürt werden, wie auch gedeckt werden können. Hat der Roboter beispielsweise Arme, sollte er mit diesen auch arbeiten können. In der qualitativen Studie haben alle Probanden erwartet, dass »Pepper« mit seinen Händen Dinge greifen, Gegenstände heben oder vergleichbares tun kann. Nachdem aufgeschlüsselt wurde, dass er damit lediglich gestikulieren kann, waren die Probanden enttäuscht und empfanden den Roboter teilweise sogar als sinnlos. Daher sollten Einschränkungen als Chance genutzt werden, um einen Charakter zu vermitteln.
Die soziale Rolle physisch gestalten
Die Aufgabe eines soziale Robotiktypen für kognitiv und motorisch eingeschränkte Personen fokussieren sich auf die des Unterhaltens und Unterstützens. Um erfolgreich Hilfestellung zu leisten und auch in prekären Situationen ernst genommen zu werden, bedarf es eines gewissen Maßes an Präsenz und Autorität. Durch das Zusammenspiel von Präsenz und Kompetenz wird Verlässlichkeit geschaffen und Vertrauen gefördert, welches unerlässlich ist für ein harmonisches Zusammenleben.
Ein modularer Kompagnon-Roboter
Ziel des bedarfsorientierten Designs sollte sein, dass der Roboter mit seinem Nutzer und seinen Aufgaben (mit-)wächst. Mithilfe von »Deep Learning« kann der Roboter Regelmäßigkeiten, Präferenzen und Veränderungen erkennen und in die zukünftige Interaktion mit einbeziehen. Auf diese Weise wächst der Roboter mit dem Nutzer und nähert sich diesem und seinem Verhalten an.
Die Komplexität der Persönlichkeit
Im Zusammenhang mit der Individualisierbarkeit sollte auch die Persönlichkeit des Roboters individuell gestaltet sein. Es empfiehlt sich eine Basis-Persönlichkeit unter dem Leitgedanken des Kompagnon-Profiles zu schaffen und verschiedene Charakterzüge über das Zusammenleben und die Zeit, welche der Roboter mit dem Nutzer verbringt, zu formen. Auf diese Weise lernt der Roboter, ähnlich wie bei einem Kind, ständig dazu und festigt seine Persönlichkeit und stellt somit ein Unikat für seinen Nutzer dar. Der Grundgedanke des Kompagnon-Roboters ist, dass Roboter und Mensch sich schon vor Eintreten altersbedingter Beschwerden kennen. Auf diese Weise kennt der Roboter seinen Nutzer im hohen Alter so gut, sodass er sich sozial und vom Nutzer akzeptiert um ihn kümmern kann.
Kooperationspartner und Projektbeteiligte
Die Master-Thesis entstand im Wintersemester 2018/2019 an der Hochschule für Gestaltung in Schwäbisch Gmünd und fand in Kooperation mit dem Fraunhofer-Institut für Arbeitswirtschaft und Organisation IAO statt. Die Master-Thesis wurde im Team zusammen mit Jessica Glombowski und Franziska Braun angefertigt.